150x150.png)
Modern Intelligent Transport Systems (ITS) depend on accurate detection of vehicles, pedestrians, and incidents to operate safely and efficiently. Technologies such as radar, video analytics, and connected vehicle data are now commonplace, yet the foundations of traffic detection were laid nearly a century ago. The history of detection is one of steady innovation, driven by the need to respond to growing traffic volumes, improve safety, and make better use of road space.
Understanding how traffic detection has evolved provides valuable context for today’s systems and helps explain why certain technologies have endured while others have faded away.
The earliest traffic control systems relied entirely on human intervention. In the early twentieth century, traffic signals were manually operated by police officers, often from central control points. A notable example was installed in London in 1925 to control traffic along Piccadilly, using a system of mechanical levers similar to those found in railway signal boxes.
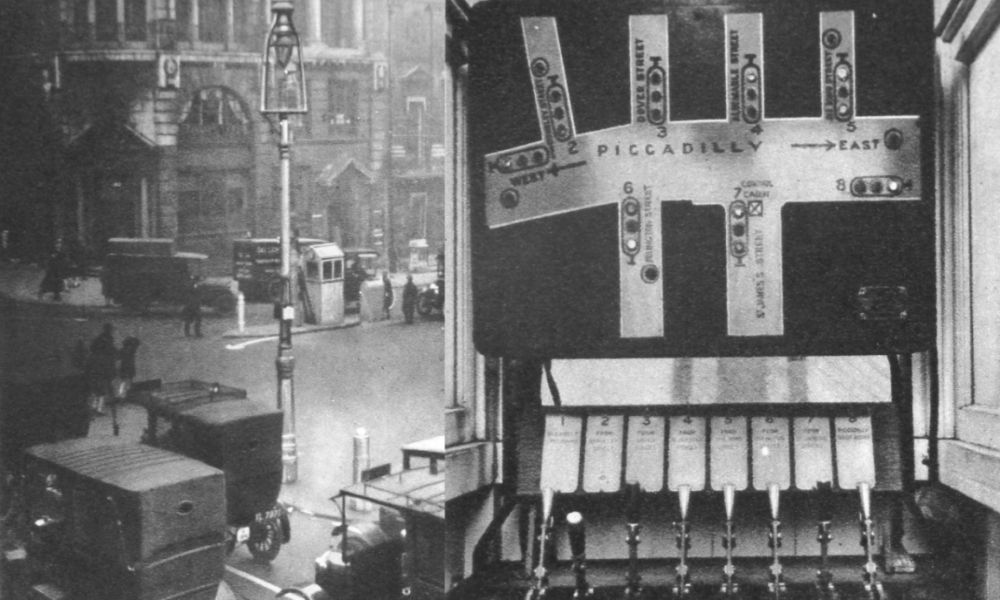
While advanced for its time, manual control had obvious limitations. Signals could only operate when an officer was present, requiring continuous staffing. As traffic levels increased, this approach became increasingly inefficient and difficult to sustain.
The desire to reduce reliance on manual operation led to the development of automatically controlled traffic signals. One of the earliest UK experiments took place in Wolverhampton in the late 1920s, where signals were initially suspended over the centre of a junction before being replaced by a permanent central pole installation.
These early automatic signals represented a major step forward but operated using fixed timings. As motor vehicle ownership expanded rapidly during the 1920s, it soon became clear that fixed-time signals lacked flexibility. Junctions could not adapt to changing traffic conditions, often resulting in unnecessary delays and congestion.
To overcome the shortcomings of fixed-time operation, engineers began exploring ways for signals to respond directly to demand. One of the earliest and most inventive solutions emerged in the United States, where the first actuated traffic signal allowed drivers to request a green light by sounding their vehicle horns.

This system was designed to prevent main roads being delayed unnecessarily when no traffic was present on side roads. While effective in principle, the constant use of horns proved disruptive for nearby residents, highlighting the need for quieter and more discreet detection methods.
At around the same time, pedestrian detection also began to evolve. The first pedestrian push-button was introduced in the late 1920s, allowing pedestrians to actively request a crossing phase. This simple concept remains a fundamental feature of pedestrian crossings today.
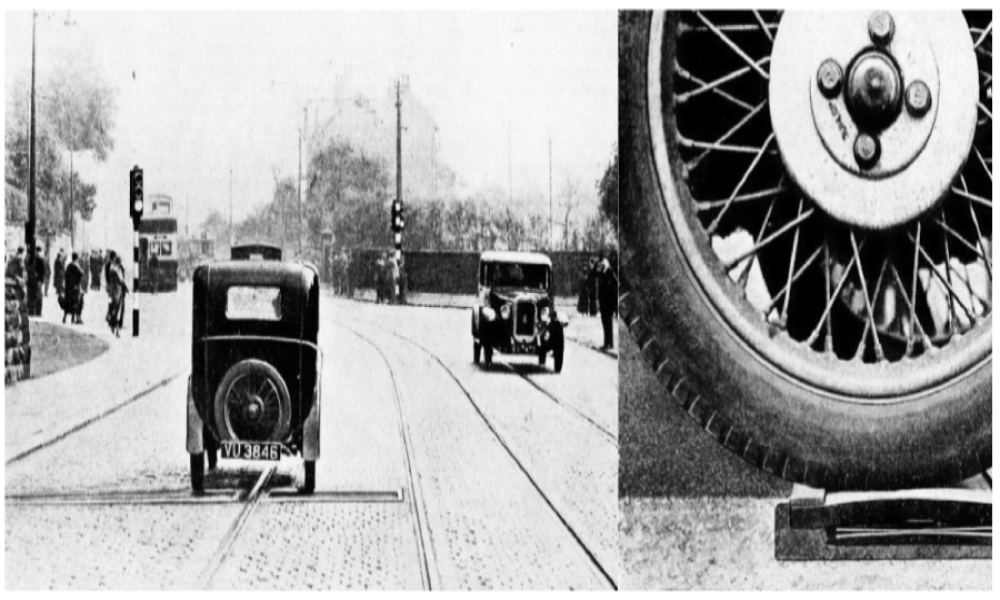
As demand-responsive control gained popularity, attention turned to detecting vehicles automatically. Early experiments included electrical contact strips embedded in the road surface, which closed a circuit when compressed by a passing vehicle. In practice, these systems were prone to failure due to water and dirt ingress.
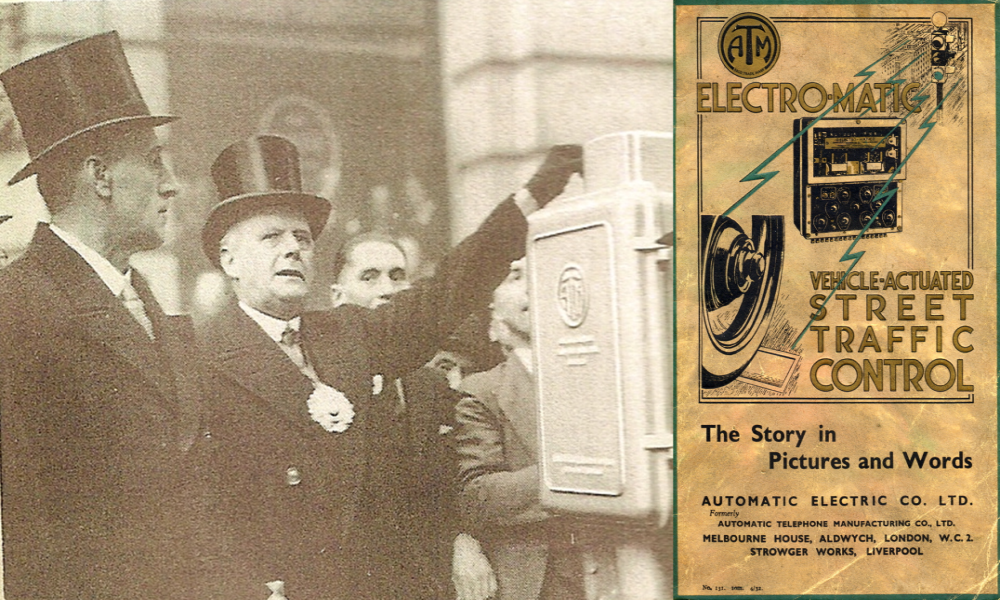
A more reliable solution emerged with pneumatic tube detection. These early in-road detectors used air-filled tubes housed in steel mountings. When a vehicle passed over the tube, a burst of air pressure activated a switch connected to the traffic signal controller. This technology proved sufficiently robust to support the first vehicle-actuated signal installations.

In the UK, the first vehicle-actuated junction was installed in London in the early 1930s. Within a few years, vehicle-actuated signals were being deployed widely, marking a significant shift toward responsive traffic control.
The 1930s also saw experimental attempts to automate pedestrian detection. One notable example used photo-cell technology, where a pedestrian demand was triggered when a beam of light across the waiting area was broken.

Although innovative, these systems appear to have suffered from reliability issues and were not widely adopted. The challenges encountered during these early trials illustrate a recurring theme in detection history: technological capability must be matched by robustness and ease of maintenance.
A major breakthrough in traffic detection came in the 1960s with the introduction of inductive loop detectors. These systems use coils of wire embedded in the road surface to create an electromagnetic field. When a vehicle passes over the loop, the field is disturbed, allowing the presence of a vehicle to be detected electronically.
Inductive loops proved to be highly reliable, accurate, and versatile. They could be used for a wide range of applications, including stop-line detection, traffic counts, and speed measurement. Despite being developed over half a century ago, inductive loops remain a reference point against which newer detection technologies are often measured.
By the 1980s, advances in electronics enabled detection systems to move above ground. Microwave radar and passive infra-red detectors were introduced, offering alternatives to in-road sensors. Early radar systems were effective at detecting moving vehicles but struggled with stationary detection, limiting their usefulness at signal stop lines.
Infra-red technology was later developed to address this limitation, allowing stationary vehicles to be detected more reliably. These developments marked the beginning of a broader trend toward non-intrusive detection, reducing the need for disruptive roadworks.
While later decades brought further innovations such as piezo sensors, magnetometers, video detection, and radar-based motorway monitoring, all of these technologies build upon principles established during the early evolution of traffic detection.
The history of detection is characterised by incremental improvement rather than sudden transformation. Each innovation was driven by practical operational needs: reducing delay, improving safety, and responding more intelligently to demand. Many of the challenges faced by early engineers, including reliability, accuracy, and public acceptability, remain relevant today.
By understanding how traffic detection has evolved, ITS professionals can better appreciate the strengths and limitations of current systems and approach future developments with a clearer understanding of the lessons learned from the past.
1925 – Manually operated traffic signals installed in London, controlled by police officers using mechanical lever systems.
1927–1928 – First experimental and permanent automatic traffic signals installed in Wolverhampton.
1928 – First actuated traffic signal introduced in Baltimore, allowing drivers to request a signal change.
1929 – Introduction of the first pedestrian push-button, enabling pedestrian-actuated crossings.
Early 1930s – Pneumatic tube detection adopted for vehicle-actuated signals; first UK installation in London.
1930s – Experimental pedestrian detection using photo-cell technology.
1960s – Inductive loop detectors introduced, becoming the dominant vehicle detection technology.
1980s – Above-ground detection emerges using radar and infra-red technologies.
To find out lots more about the history of detection use in traffic systems, try watching our video about the subject on the @ITSNow YouTube Channel -Click the buttons below to see more articles:
See all ArticlesIndustry InsightEventsITS Thought LeadershipITS Educational